京都大学、早稲田大学、岡山大学、金沢大学が共同開発したヘビ型ロボットは、配管の分岐部分や曲がり部、バルブなどがある複雑な配管内を走破し、内部の状況を把握した上で正確な地図として自動生成する。新たに開発された技術と配管内の状況確認の方法などについて概説する。
□外部から困難だった配管の現況データを入手できるためBIM-FMの運用メリット高度化にも貢献□
配管内を走破するためにヘビ型ロボットに装備されたのが20個の関節と皮膚型の接触センサー(全周圧力センサー)だ。関節ごとにモーターを駆動させることでさまざまな移動方式を実現、表面の皮膚型の接触センサーを通して、配管内への進入時に適切な力で配管に突っ張っているかを診断し、障害物や配管の曲がりを把握できる。曲管部での走行を可能にしたのが曲管部の形状に合わせて螺旋形状のままで移動する曲螺旋捻転運動だ。これによって配管内の日常点検や緊急時の点検作業の効率化が図れるとともに、3次元スキャナーなど外部からの計測では困難であった設備関連機器の現況データを入手できるため、BIM-FM適用時においても設備BIMの運用メリットを高度化できる。
□長さ6mの200Aの配管で距離推定誤差7%以内+配管地図精度は体積率で68%以上の精度達成□
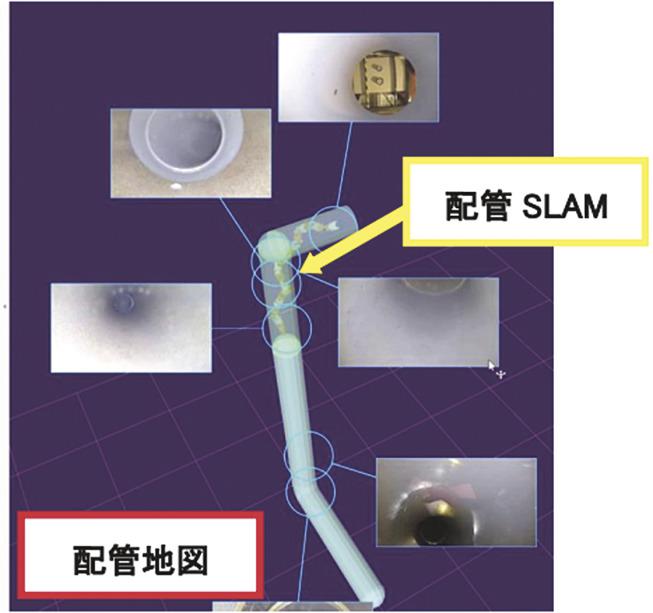
従来手法では困難な配管内でのヘビ型ロボットの現在位置・姿勢の推定のために開発されたのが各種のセンサー情報を融合し、自己位置を決定して配管地図を生成する統合型SLAM(Simultaneous Localization and Mapping)だ。
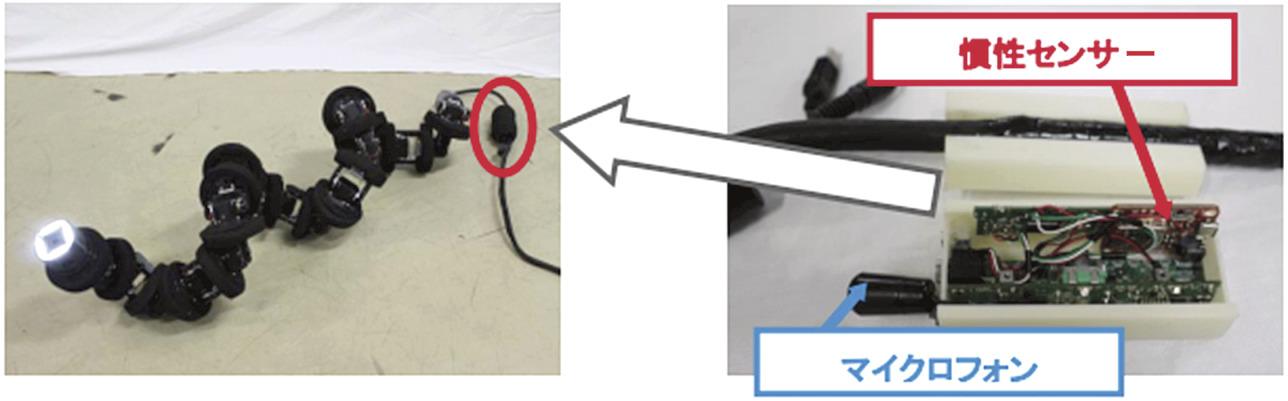
配管入口にスピーカーを設置し、ヘビ型ロボットのしっぽ部分にはマイクと姿勢を計測できる慣性センサーを装着。マイクとスピーカーからの音の再生・到達時間の差によって配管内のロボットの距離を推定している。これら音響システムによる配管内距離情報、慣性センサーからの進行方向情報、多関節モデルによる姿勢推定を組み合わせることで統合型SLAMの駆動を担保、達成精度は、水平管・垂直管・曲管を含む長さ6メートルの200Aの配管で距離推定誤差7%以内、配管地図精度は体積率で68%以上となっている。
□配管全体の状況の把握と点検箇所の記録・確認が可能になり収集情報の記録と利活用が実現□
ヘビ型ロボットには、前出の接触センサー(全周圧力センサー)と合わせて、しっぽ部分には音響・慣性センサー、先頭部分にはライトと画像センサーが搭載されており、関節部分に配置された角度センサーからは各関節の角度情報も得ることができる。統合型SLAMは、これら各種のセンサー情報を融合、運用することでヘビ型ロボットの位置を特定し、配管地図を自動生成する。
先頭部分に搭載されたカメラにより撮影された写真を配管地図上にマッピングする技術、ヘビ型ロボットが配管内で激しく回転する際にカメラ映像を安定化させる技術と合わせて、ヘビ型ロボットの形状と突っ張り力などの情報の可視化技術を開発することで、配管内点検時に、オペレーターがヘビ型ロボットの状態や挙動を確認しながら遠隔操縦できるので負担軽減に直結する。これらの技術開発によって配管全体の状況の把握、点検箇所の記録・確認が可能になり、収集情報の記録と利活用が容易になる。
今後は、既築設備などの実環境での運用のため、防水防塵機能を実装したヘビ型ロボットの開発、各種センサー情報を用いた多様な環境下でのヘビ型ロボットの半自律制御技術の開発、故障診断と故障時やタスク失敗時のリカバリー機能の開発、オペレーターのさらなる負軽減のために直感的で柔軟なユーザーインタフェースの開発などを目指している。
〈アーキネットジャパン事務局〉(毎週木曜日掲載)