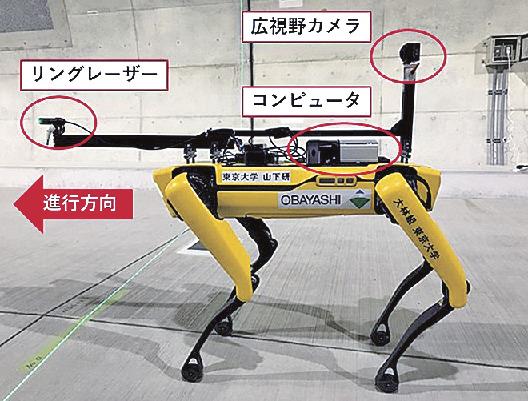
東京大学大学院工学系研究科と大林組は14日、自律4足歩行ロボットとUAV(無人航空機)を使ってトンネル断面を3D計測するシステムを開発したと発表した。地上を自律歩行するロボットと空中を飛行するUAV…
残り 609文字
このコンテンツは会員限定です。
記事の続きをお読みいただくためには
電子版への登録が必要です。
新規会員登録
ログイン

東大、大林組/トンネル断面3D計測システム、ロボットとUAV活用
2022年6月15日 技術・商品 [3面]



文字サイズ
2024年5月13日 [3面]
2024年5月10日 [3面]
2024年5月10日 [4面]
2024年5月9日 [3面]
2024年5月8日 [1面]




インフラメンテナンス市区町村長会議、全国大会
2024年5月16日経産省、持続的な企業価値向上に関する懇談会
2024年5月15日環境省、災害廃棄物対策推進シンポジウム
2024年5月14日国交省・気象庁、防災気象情報に関する検討会
2024年5月14日国交省、24年春の褒章伝達式
2024年5月14日国交省、マチミチ会議特別編ジャネット・サディク=カーン氏来日記念講演会
2024年5月13日国交省、24年春の叙勲伝達式
2024年5月13日国交省、公共事業評価手法研究委
2024年5月13日建設関係11団体、叙勲祝賀会
2024年5月13日日建連、24年度意見交換会・関東地区

脱「日本版PFI」のススメ-令和編-
詳しく見る
SDGsで世界をつなぐ
詳しく見る
鉄道で世界をつなぐ―海外プロジェクトの現状と展望
詳しく見る
詳説「公共工事標準請負契約約款」建設契約管理の理論と実践(下)
詳しく見る
建築設備新思想大系~エンジニアの副毒本
詳しく見る
改正公共工事品確法と運用指針 新・担い手3法で変わる建設産業
詳しく見る
UAV安全運航手帳(安全順守編・安全知識編)
詳しく見る
思考転換と競争優位のためのマネジメント実践読本(基本編・応用編)
詳しく見る
詳説「公共工事標準請負契約約款」建設契約管理の理論と実践(上)
詳しく見る
インフラ・ビジネス最前線―ODAの戦略的活用
詳しく見る